MewPro Bastet is a small device that enables us to control/genlock GoPro Hero 4 cameras. Unlike our monolithic MewPro Iliad, it simply listens broadcast by the master and provides sync signals for all of cameras while recording.
MewPro Bastet is ready to purchase in our shop, however, its product description is still under construction (I’m now editing it…).
Demo
The following video shows the three Hero 4s are synced and controled by Wi-Fi RC. (Power on — change mode -(video)- start recording — stop -(photo)- take a photo — power off.)
To make the footage we used:
- 3 GoPro Hero 4 Black (one master and two slaves)
- 3 MewPro 2
- 1 MewPro Bastet
- (cables and plugs/receptacles)
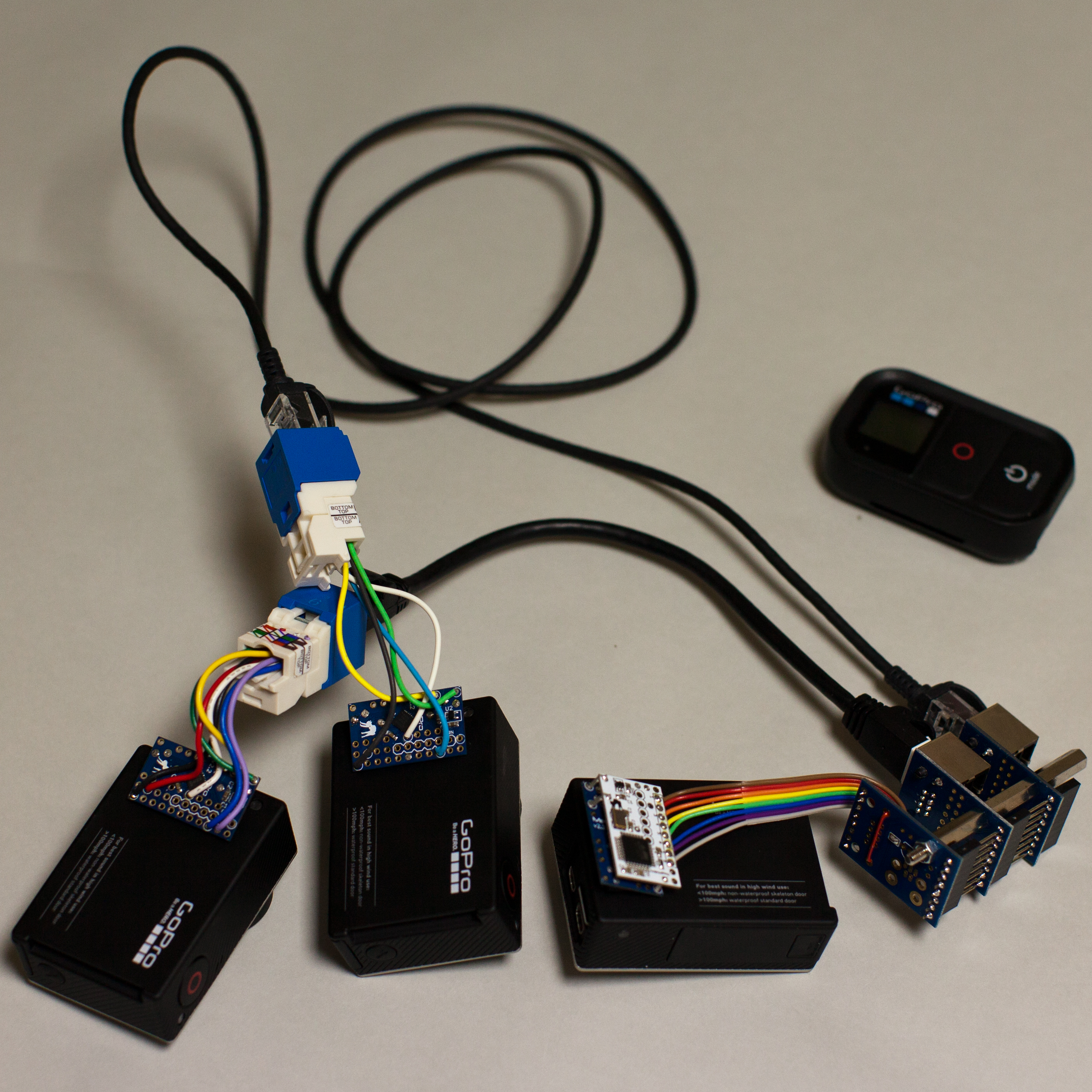
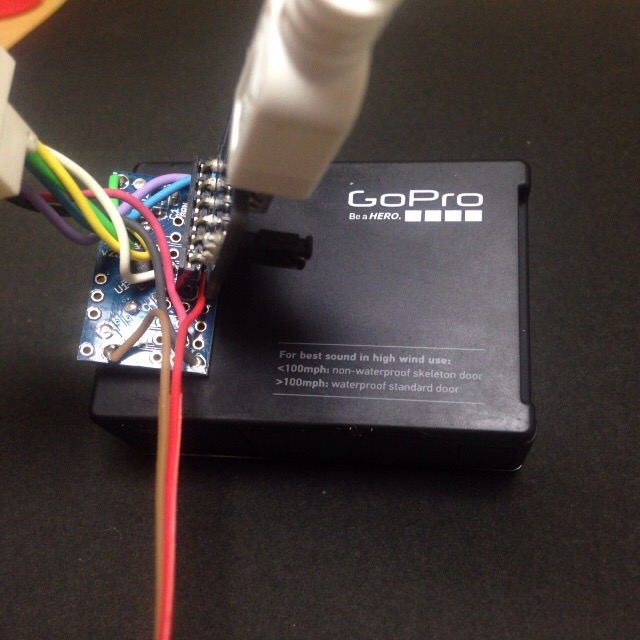
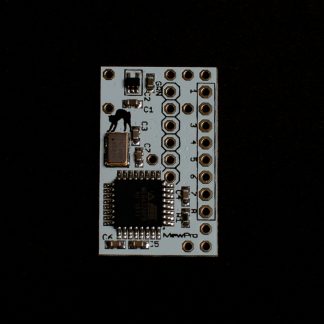
The white PCB is Bastet, the blue PCBs are MewPro 2s.
In the photo above you’ll also find bulky RJ45 Ethernet receptacles or “Stackable Hub with Buffer”, however, these parts are not always necessary for syncing cameras in, for example, weight restricted environments such as shooting videos from the sky.
How It Works
In Fig. 1 the number of GoPro Hero 4 cameras is five for example. Of course, any number of cameras can be synced in this way.
MewPro Bastet is put between the master camera (GoPro #0 in Fig. 1) and the slaves (GoPro #1, #2, #3, #4 in Fig. 1). It wiretaps the command packets that the master sends to the slaves. It understands all commands and changes its internal states accordingly. And once master’s shutter button is depressed then it begins to generate sync signals (VSYNC/HSYNC).
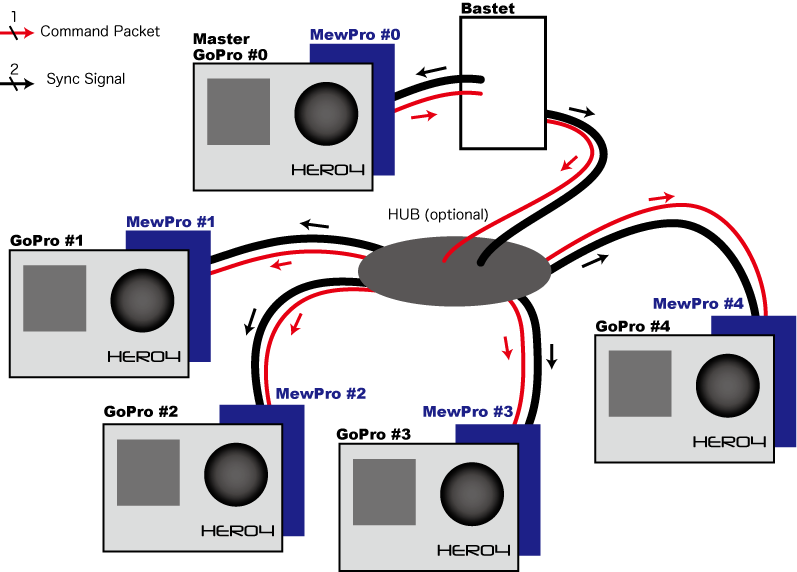
In the diagram above “Hub (optional)” can be either solder joints of wires or our Stackable Hub with Buffer or some kind of DIY octopus cable or a strip board with 6 lines in parallel or something. We only offer a solution with Stackable Hub with Buffer but you can do it yourself in place of this in order to reduce the space.
Comparison Table Between Iliad and Bastet
For your information the following is a brief comparison table between Iliad and Bastet.
| Iliad | Bastet | |
|---|---|---|
| Size | larger than Hero 4 | equal to MewPro 2 |
| MCU | ATmega2560 | ATmega328PB |
| LCD | 16 x 2 | none |
| Switches | 3 | 0 |
| Infra Red | 1 | 0 |
| Wi-Fi | no | master camera (*) |
| Software | MewPro_Iliad | MewPro_Iliad |
| MewPro 2 | all slave | all slave but one master (**) |
Note *: All the cameras are controlled by the master regardless of whether the change is made by using Wi-Fi or master camera’s button press.
Note **: The MewPro 2 board attached to the master GoPro must have MewPro 4 firmware that is compiled with #define BASTET_MASTER compiler directive. While other boards should have the default MewPro 4 firmware.
How To Use MewPro Bastet
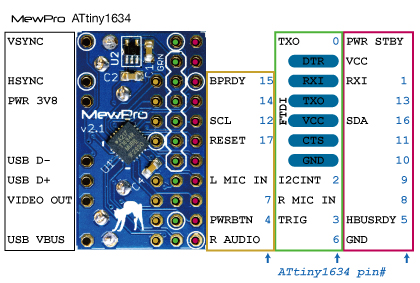
In the next blog post we’ll explain how to connect wires between Bastet and each MewPro boards.